

La principal innovación del mecanismo es que es capaz de establecer, con relativa sencillez, diferente niveles de rigidez para sus articulaciones
Un equipo de desarrolladores de la Universidad Tecnológica de Harbin, en China, ha publicado hace unos días el resultados de su trabajo en la revista Frontiers of Mechanical Engineering. La obra de este grupo es un dedo robótico que intenta emular las capacidades de los dedos de los seres humanos. Esto supone un alto nivel de destreza, así como también un gran nivel de resistencia a los impactos.
Robots con dedos lastimados
Si algunas vez te has golpeado un dedo puede que pienses que los dedos robóticos no tienen nada que envidiarle o imitar de los dedos humanos. Pero lo que en un dedo humano puede ser algo de dolor momentáneo, para un dedo robótico son pequeñas dosis de daño que se acumulan con el tiempo.
Las manos de un robot deben ser capaces de moverse con destreza, actuar con suficiente fuerza y firmeza, y al mismo tiempo absorber los impactos. Los actuales mecanismos rígidos pueden cumplir con los primeros objetivos, pero fallan en el tercero.
La solución
Los investigadores chinos han adoptado un sistema de nivel de rigidez variable. Esta alternativa permite establecer diferentes niveles de rigidez para las articulaciones según la tarea que el robot realiza. La flexibilidad le brinda a los mecanismos la capacidad para absorber los impactos.
Sin embargo, el problema que suele encontrar esta opción es la complejidad, el tamaño y el peso de los mecanismos.
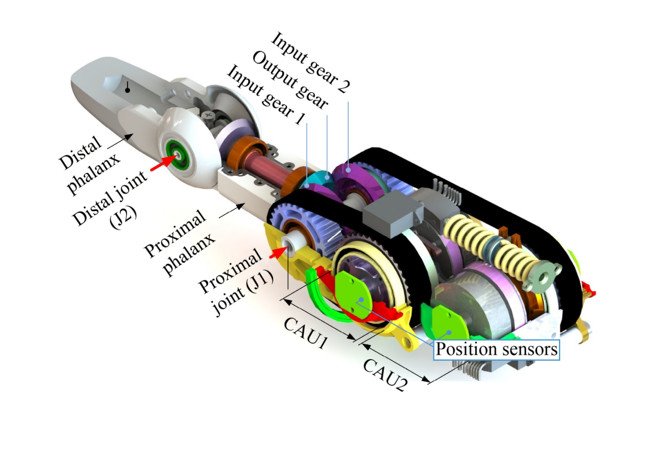
El dedo robot chino funciona a través de un esquema de ajuste antagónico. Que de un modo resumido supone que el nivel de rigidez se controla al modificar ligeramente las fuerzas que actúan sobre las articulaciones.
El prototipo pesa unos 480 gramos y fue creado con impresión 3D.
Fuente: redusers.com
La entrada Investigadores chinos crean un nuevo dedo para los robots se publicó primero en INVDES.